Electrical Specifications
125
November 2002 − Revised January 2005 SPRS205D
5.15 Enhanced Host-Port Interface (EHPI) Timings
Table 5−37 and Table 5−38 assume testing over recommended operating conditions (see Figure 5−31
through Figure 5−36).
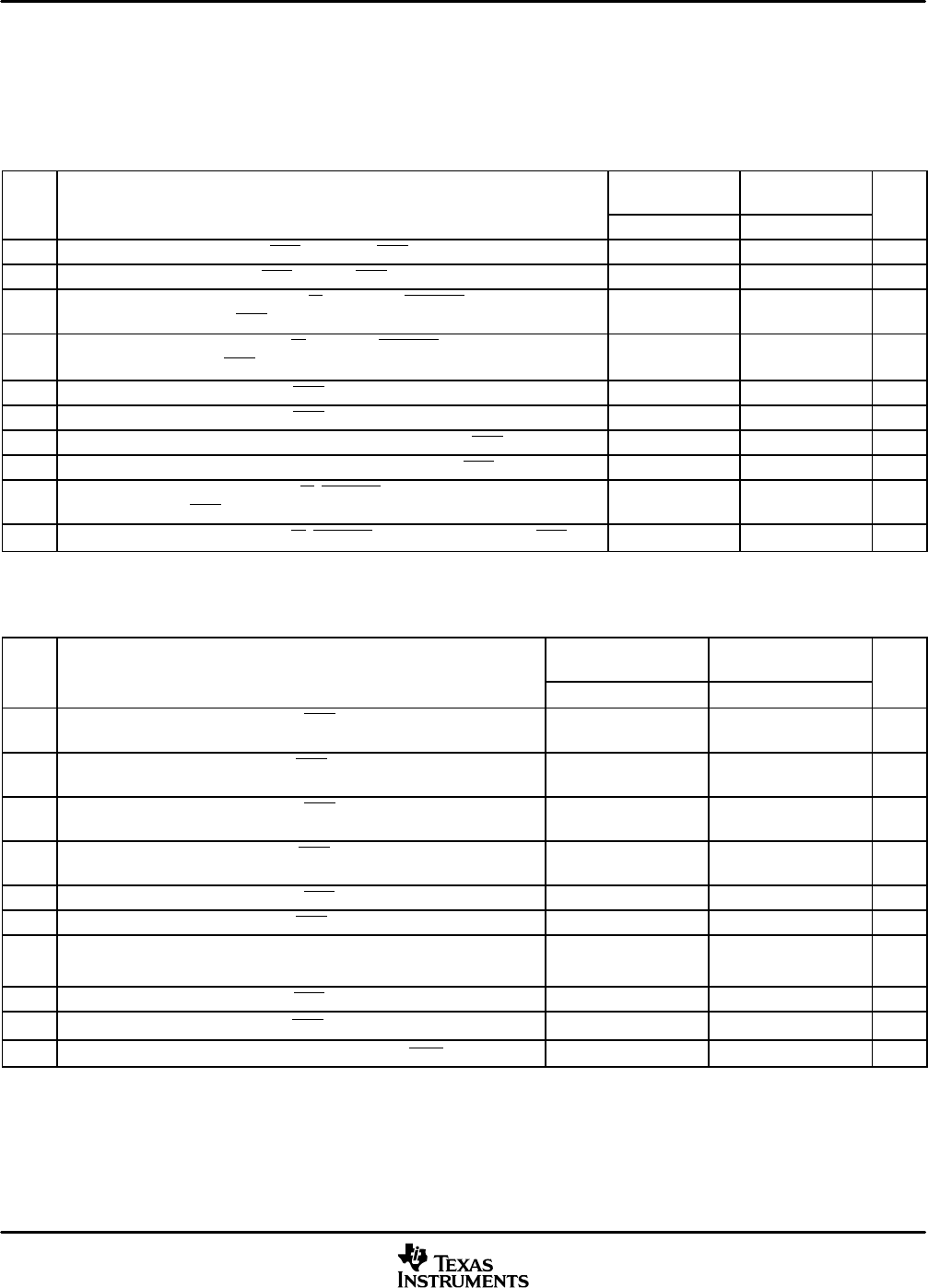
Table 5−37. EHPI Timing Requirements
CV
DD
= 1.2 V
CV
DD
= 1.35 V
CV
DD
= 1.6 V
MIN MAX MIN MAX
E11 t
su(HASL-HDSL)
Setup time, HAS low before HDS low 4 4 ns
E12 t
h(HDSL-HASL)
Hold time, HAS low after HDS low 3 3 ns
E13 t
su(HCNTLV-HDSL)
Setup time, (HR/W, HA[13:0], HBE[1:0], HCNTL[1:0]) valid
before HDS low
2 2 ns
E14 t
h(HDSL-HCNTLIV)
Hold time, (HR/W, HA[13:0], HBE[1:0], HCNTL[1:0]) invalid
after HDS low
4 4 ns
E15 t
w(HDSL)
Pulse duration, HDS low 4P
†
4P
†
ns
E16 t
w(HDSH)
Pulse duration, HDS high 4P
†
4P
†
ns
E17 t
su(HDV-HDSH)
Setup time, HD bus write data valid before HDS high 3 3 ns
E18 t
h(HDSH-HDIV)
Hold time, HD bus write data invalid after HDS high 4 4 ns
E19 t
su(HCNTLV-HASL)
Setup time, (HR/W, HBE[1:0], HCNTL[1:0]) valid before
HAS low
3 3 ns
E20 t
h(HASL-HCNTLIV)
Hold time, (HR/W, HBE[1:0], HCNTL[1:0]) valid after HAS low 4 4 ns
†
P = 1/CPU clock frequency in ns. For example, when running parts at 200 MHz, use P = 5 ns.
Table 5−38. EHPI Switching Characteristics
.
CV
DD
= 1.2 V
CV
DD
= 1.35 V
CV
DD
= 1.6 V
MIN MAX MIN MAX
E1 t
en(HDSL-HDD)M
Enable time, HDS low to HD bus enabled
(memory access)
6 26 6 19 ns
E2 t
d(HDSL-HDV)M
Delay time, HDS low to HD bus read data valid
(memory access)
14P
†‡
14P
†‡
ns
E4 t
en(HDSL-HDD)R
Enable time, HDS low to HD enabled
(register access)
6 26 6 19 ns
E5 t
d(HDSL-HDV)R
Delay time, HDS low to HD bus read data valid
(register access)
26 19 ns
E6 t
dis(HDSH-HDIV)
Disable time, HDS high to HD bus read data invalid 6 26 6 19 ns
E7 t
d(HDSL-HRDYL)
Delay time, HDS low to HRDY low (during reads) 18 15 ns
E8
t
d(HDV-HRDYH)
Delay time, HD bus valid to HRDY high
(during reads)
2 2 ns
E9 t
d(HDSH-HRDYL)
Delay time, HDS high to HRDY low (during writes) 18 15 ns
E10
t
d(HDSH-HRDYH)
Delay time, HDS high to HRDY high (during writes) 14P
†‡
14P
†‡
ns
E21
t
d(COH-HINT)
Delay time, CLKOUT high to HINT high/low 0 11 0 8 ns
†
P = 1/CPU clock frequency in ns. For example, when running parts at 200 MHz, use P = 5 ns.
‡
EHPI latency is dependent on the number of DMA channels active, their priorities and their source/destination ports. The latency shown assumes
no competing CPU or DMA activity to the memory resource being accessed by the EHPI.








